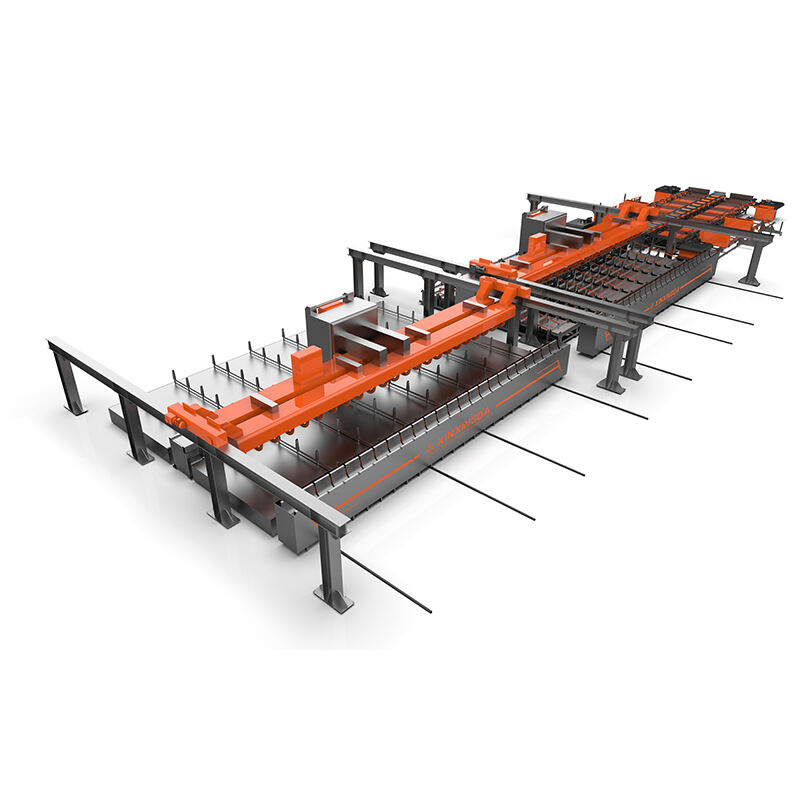
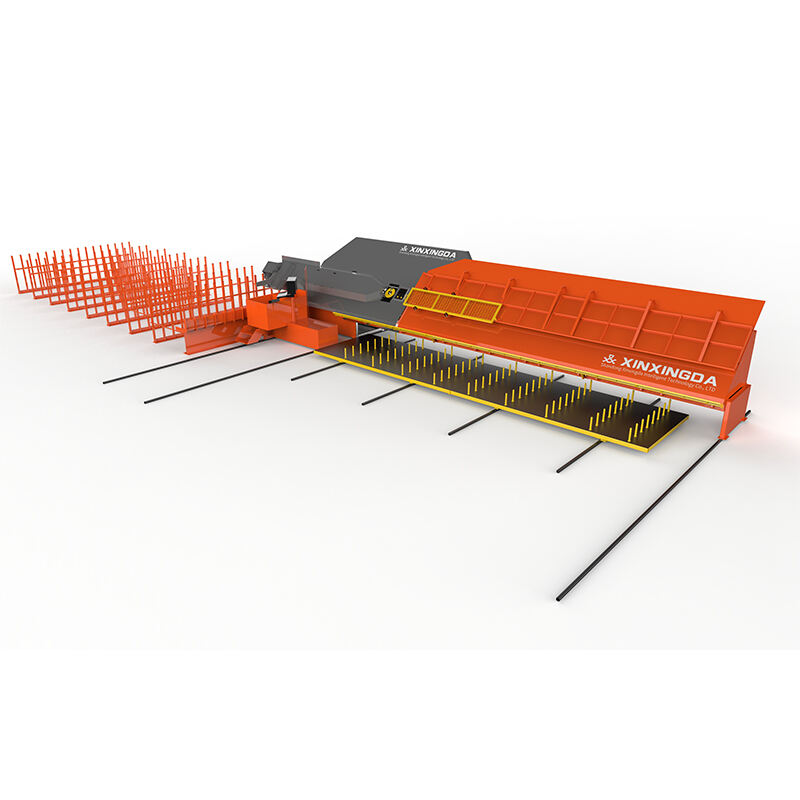
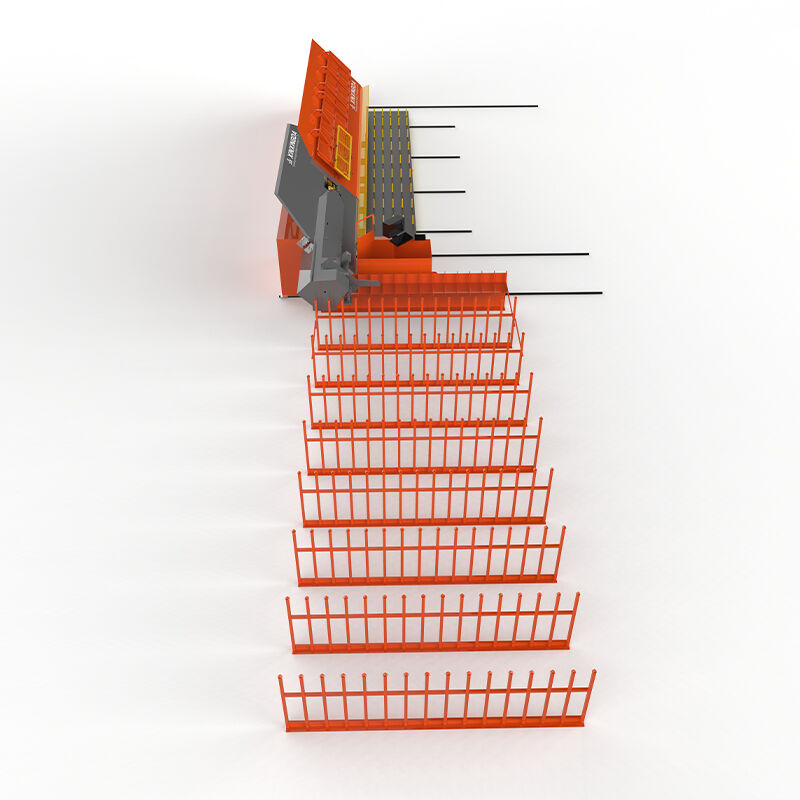
หุ่นยนต์เชื่อมสากล
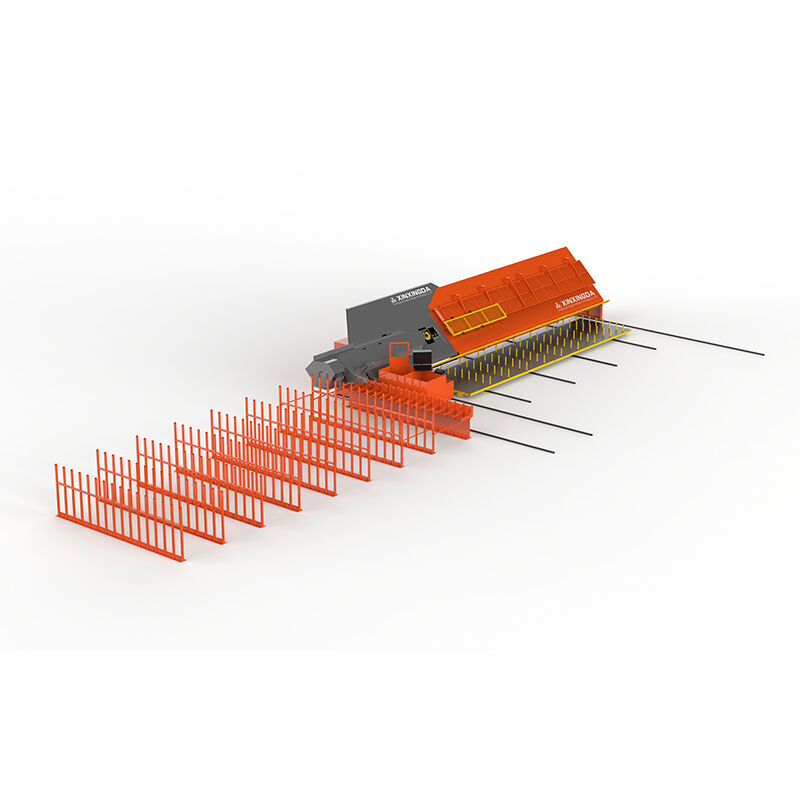
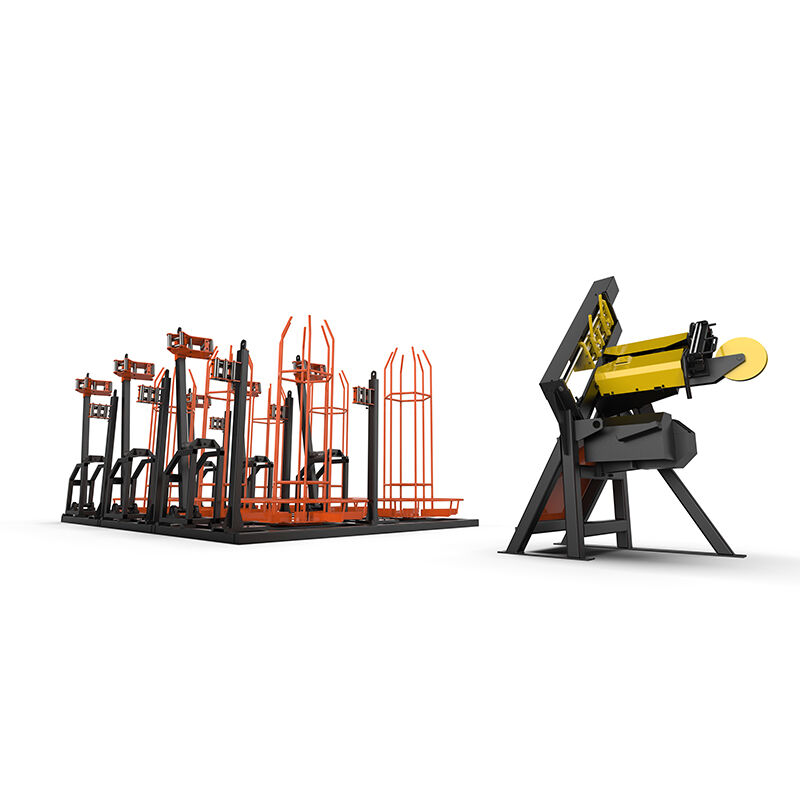
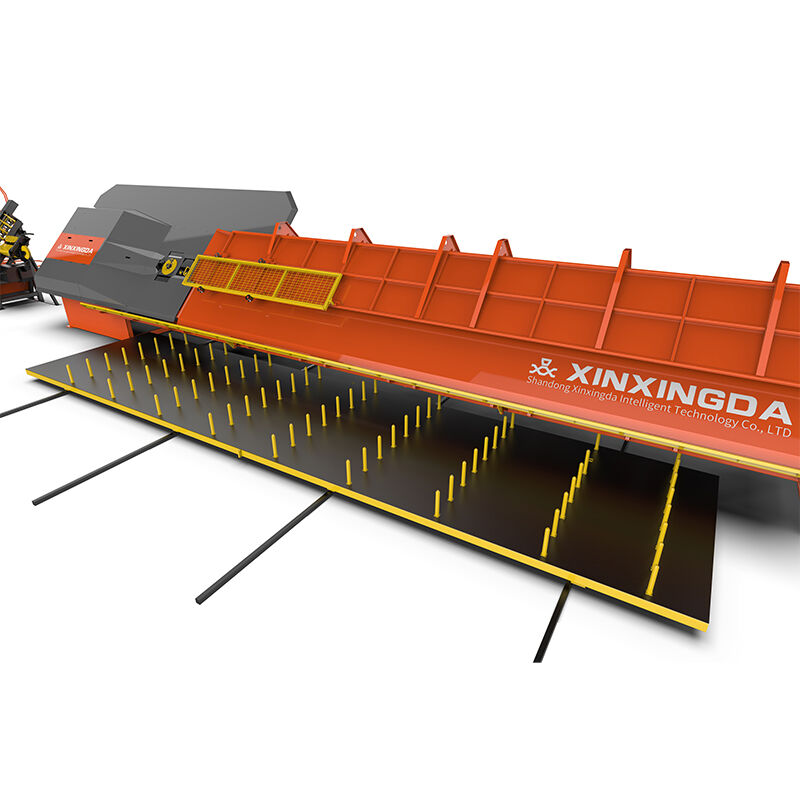
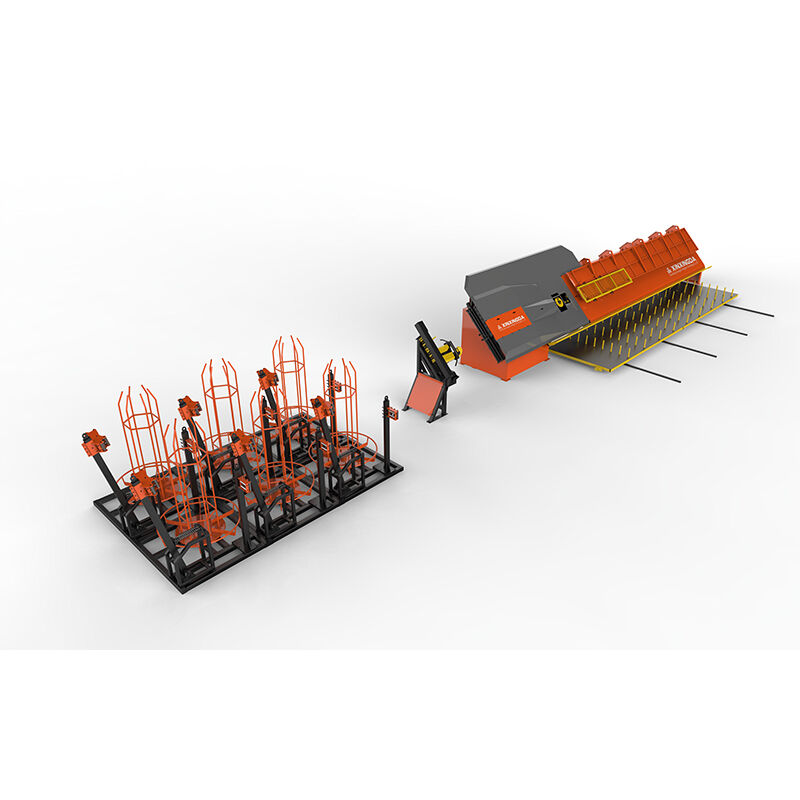
หุ่นยนต์อเนกประสงค์สำหรับการเชื่อม แสดงถึงความก้าวหน้าอย่างปฏิวัติในเทคโนโลยีการผลิตแบบอัตโนมัติ ซึ่งผสานรวมวิศวกรรมความแม่นยำเข้ากับระบบอัตโนมัติอัจฉริยะ เพื่อให้บริการโซลูชันการเชื่อมที่โดดเด่นในหลากหลายแอปพลิเคชันอุตสาหกรรม ระบบหุ่นยนต์ขั้นสูงเหล่านี้ผสานเทคโนโลยีเซ็นเซอร์ล่าสุด ความสามารถในการเขียนโปรแกรมขั้นสูง และการออกแบบเชิงกลที่แข็งแกร่ง เพื่อดำเนินการงานการเชื่อมที่ซับซ้อนด้วยความสม่ำเสมอและแม่นยำอย่างน่าทึ่ง แพลตฟอร์มหุ่นยนต์อเนกประสงค์สำหรับการเชื่อมนี้ออกแบบตามหลักการร่วมมือ (collaborative design) ที่ช่วยให้สามารถทำงานร่วมกันระหว่างมนุษย์กับหุ่นยนต์ได้อย่างปลอดภัย โดยยังคงรักษามาตรฐานประสิทธิภาพระดับอุตสาหกรรมไว้ ระบบเหล่านี้มาพร้อมอินเทอร์เฟซการเขียนโปรแกรมที่ใช้งานง่าย ซึ่งช่วยให้ผู้ปฏิบัติงานสามารถตั้งค่าพารามิเตอร์การเชื่อม ตำแหน่งของหัวเชื่อม และรูปแบบการเคลื่อนที่ได้อย่างรวดเร็ว โดยไม่จำเป็นต้องมีความเชี่ยวชาญทางเทคนิคขั้นสูง ฟังก์ชันหลักครอบคลุมกระบวนการเชื่อมหลายประเภท ได้แก่ MIG, TIG และการเชื่อมแบบจุด (spot welding) ทำให้หุ่นยนต์อเนกประสงค์สำหรับการเชื่อมสามารถปรับใช้ได้กับวัสดุชนิดต่าง ๆ และความหนาที่แตกต่างกัน กลไกควบคุมแรงขั้นสูงรับประกันความลึกของการเจาะ (penetration depth) และคุณภาพของรอยเชื่อม (bead quality) ที่เหมาะสมที่สุด ขณะเดียวกันก็ลดการบิดเบือนของวัสดุให้น้อยที่สุด ระบบการมองเห็นแบบบูรณาการให้ความสามารถในการตรวจสอบแบบเรียลไทม์และการปรับแก้แบบปรับตัว โดยปรับพารามิเตอร์การเชื่อมโดยอัตโนมัติตามรูปทรงของรอยต่อ (joint geometry) และความแปรผันของวัสดุ โซลูชันหุ่นยนต์อเนกประสงค์สำหรับการเชื่อมมีสถาปัตยกรรมการออกแบบแบบโมดูลาร์ ซึ่งรองรับการบูรณาการอย่างง่ายดายกับไลน์การผลิตที่มีอยู่แล้วและระบบควบคุมคุณภาพ ระบบตรวจสอบอุณหภูมิและการจัดการความร้อนปกป้องทั้งชิ้นงานและส่วนประกอบของหุ่นยนต์จากการสัมผัสความร้อนมากเกินไป อัลกอริธึมการวางแผนเส้นทาง (path planning algorithms) ช่วยเพิ่มประสิทธิภาพการเคลื่อนที่ของหัวเชื่อมเพื่อลดเวลาแต่ละรอบ (cycle times) ขณะยังคงรักษามาตรฐานคุณภาพของการเชื่อมไว้ ระบบเหล่านี้รองรับทั้งวิธีการเขียนโปรแกรมแบบสอนและทำซ้ำ (teach-and-repeat) และการเขียนโปรแกรมแบบออฟไลน์ผ่านซอฟต์แวร์เฉพาะทาง แพลตฟอร์มหุ่นยนต์อเนกประสงค์สำหรับการเชื่อมนี้ติดตั้งคุณสมบัติด้านความปลอดภัยครบครัน ได้แก่ ระบบตรวจจับการชน (collision detection), ฟังก์ชันหยุดฉุกเฉิน (emergency stop functions) และสิ่งกีดขวางเพื่อความปลอดภัย ซึ่งช่วยให้มั่นใจในความปลอดภัยของผู้ปฏิบัติงานระหว่างการใช้งาน ฟังก์ชันบันทึกข้อมูล (data logging) และการติดตามย้อนกลับ (traceability) ช่วยให้สามารถจัดทำเอกสารคุณภาพอย่างครอบคลุม และวิเคราะห์เพื่อปรับปรุงกระบวนการได้อย่างมีประสิทธิภาพ